Czytaj więcej
Czytaj mniej
Laboratoryjny model kolejki typu monorail
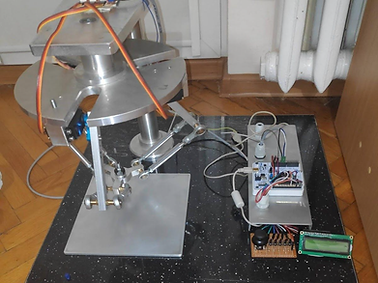
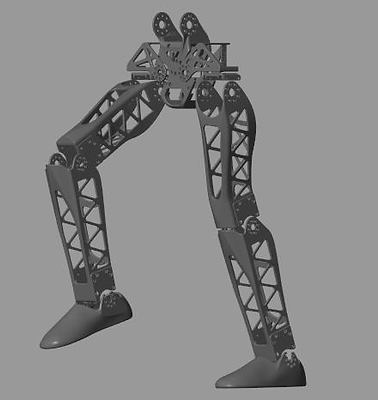
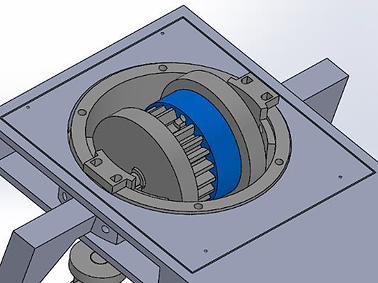
Projekt obejmował budowę, symulację oraz fizyczny model laboratoryjny wagonu kolejki typu monorail oraz toru. Została ona stworzona w celu przeprowadzenia dalszych badań nad inteligentnymi systemami transportowymi. Największa część pracy dotyczyła sposobu w jaki został zaprojektowany układ napędowy, uzyskaniu stabilizacji w trakcie jazdy oraz torze po którym porusza się kolejka. Do utworzenia modeli, wszystkich części oraz zasymulowania obiektu zastosowano oprogramowanie SolidWorks, a fizyczny obiekt został wydrukowany za pomocą drukarek 3D w technologii przyrostowej FDM. Przygotowano także układy sterujące wagonem kolejki i stanowiskami zatrzymania kolejki.